OCTOBER 16, 2018 FEATURE
A new approach to infuse spatial notions into robotics systems

a) 1% of the 2500 exploratory arm configurations mi . b) Two 3D projections of 1% of the sets Mi embedded in the 4D motor space. c) Schematic of the projected manifold and capturing of external parameters. d) Projection in 3D of the 2500 manifolds Mi (gray points) with surfaces corresponding to translations in the working space for different retinal orientations. Credit: Laflaquière et al.
Researchers at Sorbonne Universités and CNRS have recently investigated the prerequisites for the emergence of simplified spatial notions in robotic systems, based on on a robot’s sensorimotor flow. Their study, pre-published on arXiv, is a part of a larger project, in which they explored how fundamental perceptual notions (e.g. body, space, object, color, etc.) could be instilled in biological or artificial systems.
So far, the designs of robotic systems have mainly reflected the way in which human beings perceive the world. Designing robots guided solely by human intuition, however, could limit their perceptions to those experienced by humans.
To design fully autonomous robots, researchers might thus need to step away from human-related constructs, allowing robotic agents to develop their own way of perceiving the world. According to the team of researchers at Sorbonne Universités and CNRS, a robot should gradually develop its own perceptual notions exclusively by analyzing its sensorimotor experiences and identifying meaningful patterns.
“The general hypothesis is that no one gives perceptual notions to biological organisms,” Alexander Terekhov, one of the researchers who carried out the study, told TechXplore. “These concepts are instead developed over time, as useful tools that help them to make sense of the vast sensorimotor data they are constantly exposed to. As a consequence, a frog’s notion of space will most likely differ from that of a bat, which will in turn differ from that of humans. So when building a robot, what notion of space should we give it? Probably none of these. If we want robots to be truly intelligent, we should not build them using abstract notions, but instead, provide them with algorithms that will allow them to develop such notions themselves.”
Terekhov and his colleagues showed that the notion of space as environment-independent cannot be deduced only by exteroceptive information, as this information varies greatly depending on what is found in the environment. This notion could be better defined by looking into functions that link motor commands to changes in stimuli that are external to the agent.
“Important insight came from an old study by famous French mathematician Henri Poincare, who was interested in how mathematics in general and geometry in particular could emerge from human perception,” Terekhov said. “He suggested that the coincidence in the sensory input may play a crucial role.”

The agent can move its sensors in external space using its motor. Although the external agent configuration x can be the same, its sensory experience varies greatly depending on the structure of the environment. Credit: Laflaquière et al.
The ideas introduced by Poincare can be better explained with a simple example. When we look at a given object, the eyes capture a particular image, which will change if the object moves 10 cm to the left. However, if we move 10 cm left, the image we see will remain almost exactly the same.
“This property seems miraculous if you think about how many receptors the human body has,” Terekhov said. “It is nearly impossible to have the same input twice in a lifetime, yet we constantly experience it. These low-probability events may be used by the brain to construct general perceptual notions.”
To apply these ideas to the design of robotic systems, the researchers programmed a virtual robotic arm with a camera at its tip. The robot noted the measurements coming from the arm’s joints every time it received the same visual input. “By associating all these measurements, the robot builds an abstraction that is mathematically equivalent to the position and orientation of its camera, even though it has no explicit access to this information,” Terekhov said. “The most important thing is that even though this abstract notion is learned based on the visual input, it ends up being independent from it, and thus works for all environments; the same way our notion of space does not depend on the particular scene we see.”
Applying the same principle in another study, the researchers successfully prompted a robot to compensate for an optical distortion caused by a lens placed in front of its camera. Typically, this would be attained by training algorithms on pairs of distorted and undistorted images.
“The tricky part of our study was that the robot had to complete this task by looking into the distorted images only, just like humans learn to compensate for the distortion introduced by eye glasses,” Terekhov said. “We believe that the principles introduced by Poincare, which are the basis of our algorithms, could be more general and are utilized by the brain at multiple levels. We are currently exploring the possibility of using these principles to build neural networks that do not suffer from catastrophic forgetting and can gradually accumulate knowledge.”
More information: Learning agent’s spatial configuration from sensorimotor invariants. arXiv:1810.01872v1 [cs.LG]. arxiv.org/abs/1810.01872
Henri Poincaré, Science and Hypothesis. www.gutenberg.org/files/37157/37157-pdf.pdf
Unsupervised model-free camera calibration algorithm for robotic applications. ieeexplore.ieee.org/document/7353799
Source : https://techxplore.com/news/2018-10-approach-infuse-spatial-notions-robotics.html
April 2018, The Guardian mentions Kevin O’Regan’s Why Red Doesn’t Sound Like a Bell among five books selected by Nick Chater to explore the mysteries of the mind February 2018, Get lost easily? Where’s your inner compass? ERC=Science² describes some interesting results and new directions of the ERC FEEL project.

Our sense of superiority notwithstanding, the human senses are not the most sophisticated in the animal kingdom. Dogs can hear sounds at a pitch well out of our range. Dolphins use echolocation as a simple and effective SatNav device.
So could humans incorporate new senses? Yes, says Kevin O’Regan, an ERC-funded researcher at the University of Paris Descartes. One project on his list is fine-tuning our internal GPS system so that finding magnetic north becomes second nature.
In the lab with Dr. O’Regan (buckle up!)

To test whether people can learn to ‘feel’ North on a compass, Frank Schumann in O’Regan’s team seated volunteers blindfolded in a special chair, gave them headphones (linked to an iPhone) that played a waterfall sound when pointed North, and then began rotating the chair. He doesn’t say, in his published Nature Scientific Reports paper, whether anyone got carsick.
This line of research was once seen as quackery, but has been attracting attention in recent years. Five years ago, scientists in the US identified neurons in the inner ear of pigeons which respond to the direction and intensity of magnetic fields. Then teams in the USA and the UK reported that humans, too, had a built-in homing device; we’re just not as adept at using it as pigeons are.
Now Frank Schumann and Christoph Witzel in O’Regan’s team have trained people to integrate a sense of magnetic north into their perceptual system using two smartphone apps called “hearSpace” and “naviEar”.
One group of people was given earphones enhanced with a geomagnetic compass. When they turned north, the pleasant sound of a waterfall could be heard from in front of them; the sound moved to the side and back as they turned away. And here’s the surprise: Soon people were so attuned to this new sense of direction that it became an integral part of their sense of orientation. Or, as O’Regan puts it: “We successfully integrated magnetic north into the neural system in the inner ear that underlies spatial orientation.”
Just to prove the point, the researchers then recalibrated the equipment. “We cheated by changing the direction of north as people turned. After 20 minutes of training, when we took off the earphones, people’s sense of space was all mucked up,” the researchers say, “and it even remained mucked up when we retested them a few days later.” This means that people not only integrated the north signal, but quickly came to trust the artificial magnetic sense more than their natural vestibular sensations.
Buzz for North
Companies are already getting in on the act. Cyborg Nest is selling a product called North Sense. It can be attached to the skin and gently vibrates when the user faces north. Rivals include wearable ankletsthat buzz when heading north – along with a host of smartphone apps that offer less invasive ways to find your way home.
And it needn’t stop with a compass. O’Regan thinks we could potentially find other ways to augment the suite of senses that comes preloaded in our heads. That, he says, would be “a first step towards the development of cyborgs.”
And that opens some interesting philosophical questions, about the difference between humans and robots. After all, O’Regan works at the university named after the man who wrote: “I think, therefore I am.” So if you’re up for some meditations, read on.
O’Regan starts with a simple question: What is it about a red patch of colour that makes us sense ‘red’ the way we do? Is it the way red patches excite the light receptors in our retinas? Yes, but why that particular experience? Is it the way nerves carry the signals to the brain? Yes, but what is it about those signals that mean ‘red?’ Is it the way the synapses in the brain cells respond to the signals from the retinas? Yes, but what is it about the synapses or the excitation patterns that would have anything to do with what we mean by ‘red?’
The more you think about it, the harder it is to say why red things feel red. There is, O’Regan says, “an infinite regress of questions” that get you nowhere. There’s “no way of making the link between physics and experience.”
What does it mean, to ‘feel’?

Trying to make machines that can feel the world – or emotions – is bound to involve some heavy philosophy. Here’s how O’Regan starts to explain it, in one of his academic presentations.
How to make a robot see red
So he takes a different approach. He notes that what we really mean by a sensory experience is what we do when we interact with the world when we have that experience. So in the case of ‘red’ what we mean by the experience of ‘red’is the particular way we interact with light reflected off a red object. That pattern can be described mathematically. It can as easily be programmed into a robot as you can teach a child the word for ‘red.’ The robot would see red, as defined in this precise manner.
In the same way, you could teach a robot to smell flowers, or sense the space around it. So long as the robot interacts in the correct way with its environment, it is feeling. The only thing lacking is that it be self-aware that it is feeling – but that, too, could be programmed.
O’Regan’s ERC grant allows him to explore what he calls this sensorimotor theory of sensation, on which he began work more than 15 years ago. According to this approach, our experience of the world is a product of how we interact with it, and it obeys a series of laws known as sensorimotor contingencies.
“Most people are looking for something in the brain that generates consciousness,” O’Regan says. “Perhaps they are looking for comfort in the idea that robots would never be able to feel in the way we feel.”
He believes this is a waste of time: there is nothing sufficiently special about humans that makes conscious robots an impossibility. Instead, we should focus on understanding how we really experience the world so that we can understand and enhance our ability to feel.
O’Regan says robots will soon eclipse human intelligence and will be able to perceive the world just as we do. “If we can explain feel – as a way of interacting with the environment – we can explain everything including emotions,” he says. “Will robots have emotions one day? Yes, it’s coming in the next 20 years.”
Source : https://www.sciencesquared.eu/how-do-you-feel
Kevin O'Regan explains the sensorimotor theory of consciousness in his interview with Cordelia Erickson-Davis. Source : O’Regan, K. & Erickson-Davis, C. (2018). On the “feel” of things: the sensorimotor theory of consciousness. An interview with Kevin O’Regan. ALIUS Bulletin, 2, 87-94.
February 2017, A magnetic sixth sense: The hearSpace smartphone app transforms human experience of space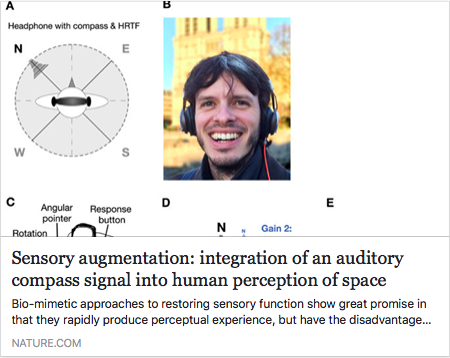 A novel sensory augmentation device, the hearSpace app, allows users to reliably hear the direction of magnetic North as a stable sound object in external space on a headphone.
A novel sensory augmentation device, the hearSpace app, allows users to reliably hear the direction of magnetic North as a stable sound object in external space on a headphone.
For this, Schumann & O'Regan developed a new approach to sensory augmentation that piggy-backs the directional information of a geomagnetic compass on ecological sensory cues of distal sounds, a principle they termed contingency-mimetic sensory augmentation. In what is potentially a break-through advantage, contingency-mimetics allows the magnetic augmentation signal to integrate into the existing spatial processes via natural mechanisms of auditory localisation.
Despite many suggestions in the literature that sensory substitution and augmentation may never become truly perceptual, their results, now published in the journal Scientific Reports, show that short training with this magnetic-auditory augmentation signal leads to long-lasting recalibration of the vestibular perception of space, either enlarging or compressing how space is perceived.
Source: Schumann, F., & O’Regan, J. K. (2017). Sensory augmentation: integration of an auditory compass signal into human perception of space. Scientific Reports, 7, 42197. http://www.nature.com/articles/srep42197
May 2016, EU Research, journal with extensive experience working with EU funded projects, wrote an article about FEEL
The FEEL project are developing a new approach to the ‘hard’ problem of consciousness, pursuing theoretical and empirical research based on sensorimotor theory. We spoke to the project’s Principal Investigator J. Kevin O’Regan about their work in developing a fullyfledged theory of ‘feel’, and about the wider impact of their research
November 2015, Kevin O'Regan's talk on how a naive agent can discover space by studying sensorimotor contingencies. Presented at BICA 2015Kevin O'Regan from Alexei Samsonovich on Vimeo.
June 2015 French Tv programme (E=M6) broadcasted Kevin O'Regan's explaination on magic and illusion in the first part of the video and in the last part there is Christoph Witzel and Carlijn Van Alphen’s experiment on the dress illusionMay 2015, Article by Laura Spinney about our work on infant development

Image courtesy of Serge Bertasius Photography at FreeDigitalPhotos.ne
GIVE a 14-month-old baby a rake and show it a toy just out of its reach, and it will do one of a number of things. It might wave the rake about without making contact with the toy, for example, or it might drop the rake and point at the toy. What it won’t do is use the rake to bring the toy within its grasp. Not until around 18 months of age does a baby realise that the rake can function as a tool in this way—and then it does so quite suddenly.
At Paris Descartes University in France, developmental psychologist Jacqueline Fagard is interested in what it is that changes in the baby’s brain at that age, that allows it to learn that new behaviour. Another person who is interested in the answer to that question is experimental psychologist Kevin O’Regan, who works at the same university.
March 2015, Laura Spinney's article about Color workpackage of Feel project
WHERE does the feeling of redness come from? You might think it is generated inside your brain when it detects light of a certain wavelength. That’s the conventional and in some ways the instinctive view. But colour scientists have known for a long time that this is wrong.
March 2015: Here is our explanation of why the famous photo of "The Dress" looks utterly different to different observers.
February 2015, Laura Spinney's article about Math related workpackage of Feel project
TRY this: close your eyes and touch your nose with your index finger. You know that you are touching yourself, but how do you know it?
December 2014, Laura Spinney's article about the "Philosophy" workpackage of Feel project
What’s missing is an account of the phenomenal experience of perception—what it feels like. With its emphasis on our active engagement with the world, the sensorimotor theory aims to fill that gap by providing a language with which we can articulate what our experiences are like.
In a speech called “This is water”, American writer David Foster Wallace recounted the story of a fish who greets two younger fish with the words, “Morning boys, how’s the water?” The two young fish swim on for a bit before one says to the other, “What the hell is water?” Wallace’s point was that we are so well-adapted to our medium that we don’t perceive it any more. If we want to understand what it means to be human, we need to step outside it.
There is a long tradition of researchers doing just that, to try to understand the nature of perception. In the late 19th century, for example, American psychologist George Stratton sported a strange tube over one eye (the other eye was covered) that inverted the world left-right and up-down, to see how this radically altered world would look to him—and, importantly, if he could adapt to it. He found he could, albeit slowly and with difficulty, and he wrote up a detailed account of his experience, one interesting aspect of which was that different elements of the visual scene “righted” themselves at different times and in different contexts.

Others have performed similar experiments using slightly different approaches and reporting different results. Some describe partial or gradual adaptation, others wholesale flipping of the visual scene, so it’s still far from clear if there is one human way of relating to the world, or many. To help throw more light on the question, in 2011 Degenaar decided to perform his own “fish-out-of-water” experiment, and donned inverting glasses.
His glasses, which actually look more like goggles, place a right-angled prism in front of each eye, thereby inverting the left and right sides of space. He wore them for four hours a day, on average, for 31 days. To begin with, he saw double and felt nauseous. He would repeatedly fail to grasp an object he could see, finding it impossible to correct for the visual inversion. But the most disturbing aspect of all, he says, was his sense of instability: each time he moved his head, the visual scene rushed past him and he couldn’t track anything in it.
Gradually, he adapted. By day four, he was able to cook a simple meal. By day 13, the visual instability had gone away. Two days after that, he ventured out into the streets of Groningen, where he was a PhD student at the time, armed with a white stick for his own and passer-bys’ protection. On the 30th day something strange happened: he could be looking at a scene, not moving his head or eyes, and he would suddenly be aware of a change in it, even though nothing had moved. A few seconds later it changed back to what it had been. “It was like a Gestalt switch, like one of those ambiguous images—the duck/rabbit or Necker cube—that you switch between seeing in different ways,” he says. Being able to switch between two possible ways of seeing the world felt both natural and exhilarating.
There are parallels in his experience to the thought experiment described in the previous post, in which a person’s sensory input is artificially modified when they look at an object of a certain colour. Initially, this person would have a dramatically different colour experience from a neighbour looking at the same object who had not been subjected to the modification. With time, however, her brain would “tune” itself to the new relationship between her eye movements and the resulting signals registered on her retina. Learning that it was the same as before, she would revert to seeing the object as the same colour as before.
Likewise, says Degenaar, with time one adapts to an inverted world and learns to move deftly through it. A conventional way of thinking about perception is to invoke an internal picture of the world that is created in our minds. If that were the case, then that adaptation would require the internal image to flip back to its correct orientation. Degenaar believes something more subtle and complex is happening.
It turns out that we don’t have equal mastery of all the methods at our disposal for visually exploring the world. So for example, turning his head towards an object was difficult when wearing the inverting glasses, but he could move his eyes to it with ease, as long as he kept his head still. According to the sensorimotor theory, perception is about the relationship between movement and the resulting sensory stimulation. The theory predicts that adaptation of visual experience would coincide with the regaining of exploratory skills—which is what happened. Degenaar’s visual experience “corrected” itself in piecemeal fashion, depending on which exploratory method he was using.
Interestingly, once he had adapted and could again see where things were in relation to himself and to each other, he still felt that he was perceiving the world differently from how he perceived it without the glasses. In other words, though the informational content he was receiving was the same, the quality of the experience—how it felt—was different. The reason, he thinks, is that the way you engage with the world in order to sense it—by moving your head, your eyes and so on—is as much a part of perception as the knowledge it affords. “Your visual experience as a whole is a combination of all these things,” he says.
Degenaar published his findings in the journal Phenomenology and the Cognitive Sciences in 2013. Self-experiment is clearly an invaluable tool for probing the phenomenal aspects of perception, but one is a small sample, and he thinks it would be interesting to repeat his experiment in a larger number of volunteers, having them describe their experiences while observers looked for changes in their behaviour that might correspond to stages in their perceptual adaptation.
His ultimate goal, with O’Regan and other members of the FEEL group, is to understand how the brain mediates sensorimotor interactions and underpins perceptual adaptation, rather than generating an internal picture of the world, and also how those relatively low-level sensorimotor interactions relate to abstract thought—the capacity for which is after all one of the things that defines humans. For now, at least, he can say one thing: he knows how the water feels.
IT’S A DILEMMA beloved of barstool philosophers everywhere: imagine that, when you and I both look at a yellow flower such as a marigold, you see blue and I see yellow. If we both describe the marigold as yellow, and if we have both grown up making yellow-type associations whenever we saw marigolds, would there be any way of telling that our perceptual experiences of the flower’s colour were fundamentally different?
September 2014, Aldebaran Robotics have put on youtube their first "A-talk" (imitating TED talks) in which Kevin O'Regan talks about the sensorimotor theory and claims that robots will soon be conscious.
February 2013, Workshop on Conceptual and Mathematical Foundations of Embodied Intelligence, Max Planck Institute for Mathematics in Sciences, Leipzig Germany
A theoretical basis for how artificial or biological agents can construct the basic notion of space
(joint work with Alban Laflaquière, Alexander Terekhov)
Mai 2012, “Je tâte donc je suis”, Podcast Recherche en Courshttp://www.rechercheencours.fr/REC/Podcast/Entrees/2012/5/25_Je_tate_donc_je_suis.html
March 2012, Interview with Paul Verschure, Convergent Science Network Podcasthttp://csnetwork.eu/podcast/?p=episode&name=2012-03-07_interview_kevin_oregan.mp3